In the previous article, we have discussed what is the kinematic chain and the important types of kinematic chains. The four-bar mechanism is one of the important kinematic chains. Let discuss the different inversions of the four-bar mechanism.
Four Bar Mechanism
Four Bar chain Mechanism is also known as the Quadric Cycle chain. The four Bar chain Mechanism will have four links, each of these links will form one turning pair. These four links can be of different lengths.
According to Grashof’s law for a Four bar chain mechanism, for at least one link to be capable of making a full revolution, and the sum of the shortest and the longest link lengths should be greater than the sum of the other two links.
One of the most important considerations for any mechanism is that one of the links should complete one complete revolution. Which will be the input crank for the mechanism.
In this Four bar chain mechanism as shown in the above gif image, It converts the rotary motion into the oscillating motion.
What is meant by the Inversion of a mechanism?
When we fix a Kinematic link in the Kinematic chain will make a mechanism, The Inversion of the mechanism is nothing but obtaining more mechanisms by fixing different Kinematic links in the kinematic chain.
Inversions of Four Bar Mechanism
There are so many possibilities to make an inversion for a four-bar chain mechanism. But for now, we will be discussing the most important inversions of the Four Bar chain Mechanism. The following are the different Inversions.
- Crank and Lever Mechanism (Beam Engine)
- Double Crank Mechanism (Locomotive coupling rod)
- Double lever Mechanism (Watt’s indicator)
Crank and Lever Mechanism (Beam Engine)
As you can see the following picture representing the crank and lever mechanism which we can see in the beam engine. Which consists of four links.
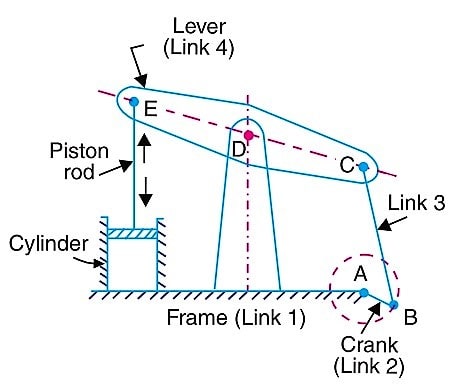
In this mechanism when the crank rotates about the fixed center A, the lever will oscillate about the center D. A piston is connected to the beam CDE at the end E point. This piston will reciprocate in the cylinder due to the rotation of the crank AB.
This mechanism will convert the rotary motion into reciprocating motion.
Double Crank Mechanism (Locomotive coupling rod)
As the name implies, there will be two cranks present in the four-bar chain mechanism. In a locomotive application, the weels will be connected with a connecting rod as shown in the below picture.
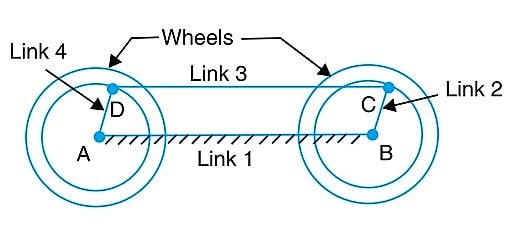
In this Mechanism, there are 2 links (AD, BC (equal lengths) acts as the cranks, and the one link(CD) acts as the connecting rod or coupling rod. and one link(AB) is fixed.
This mechanism will transmit the rotary motion from one wheel to the other.
Double lever Mechanism (Watt’s indicator)
As the name implies, there will be two levers present in the four-bar chain. This Double lever Mechanism is known as the watts indicator mechanism also.
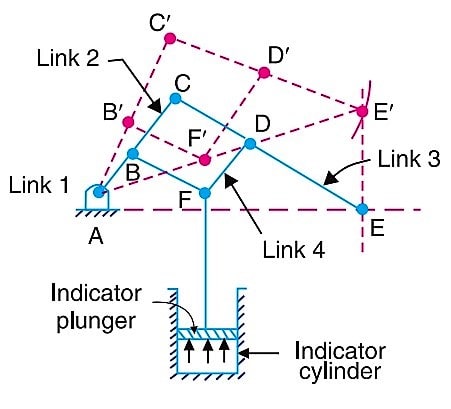
In this mechanism, we have four links A, AC, CE, BFD. These links BFD will be having two bodies BF, FD but they will make only one link due to they do not have any relative motion to one another.
In this mechanism, The links CE and the BFD will act as the levers. The linear motion of the indicator plunger will be transmitted the same on to the indicator dial or a scale.
This mechanism will transmit the linear motion from one end to the other.
These are the different Inversion of a four bar chain.
Conclusion
We have discussed what is a Four bar chain mechanism and the three inversions of the four-bar chain. If you have any further thoughts on this topic, let us know in the comment section below.
Grashof’s law which is mentioned in blog is wrong.
Updated: According to Grashof’s law for a Four bar chain mechanism, for at least one link to be capable of making a full revolution, and the sum of the shortest and the longest link lengths should be greater than the sum of the other two links.